Capabilities
The work, organised.
Falanx is built around an evolving stack of intelligent-systems capabilities. The five disciplines below are how we organise the work. The specialisms beneath them are the work.
Discipline 01 / AI
Artificial Intelligence
Autonomy and intelligence built into the platform from day one — not bolted on after the airframe is done.
- Status: Active integration
Autopilot and autonomy
AI-driven flight
Learned policies running alongside classical flight control, on board the aircraft. Active integration across the platform portfolio; next milestone is terminal navigation for interceptors.
ClassAutopilot and autonomyStackOnboard policy plus flight controlNextTerminal navigation for interceptors - Status: Fielded
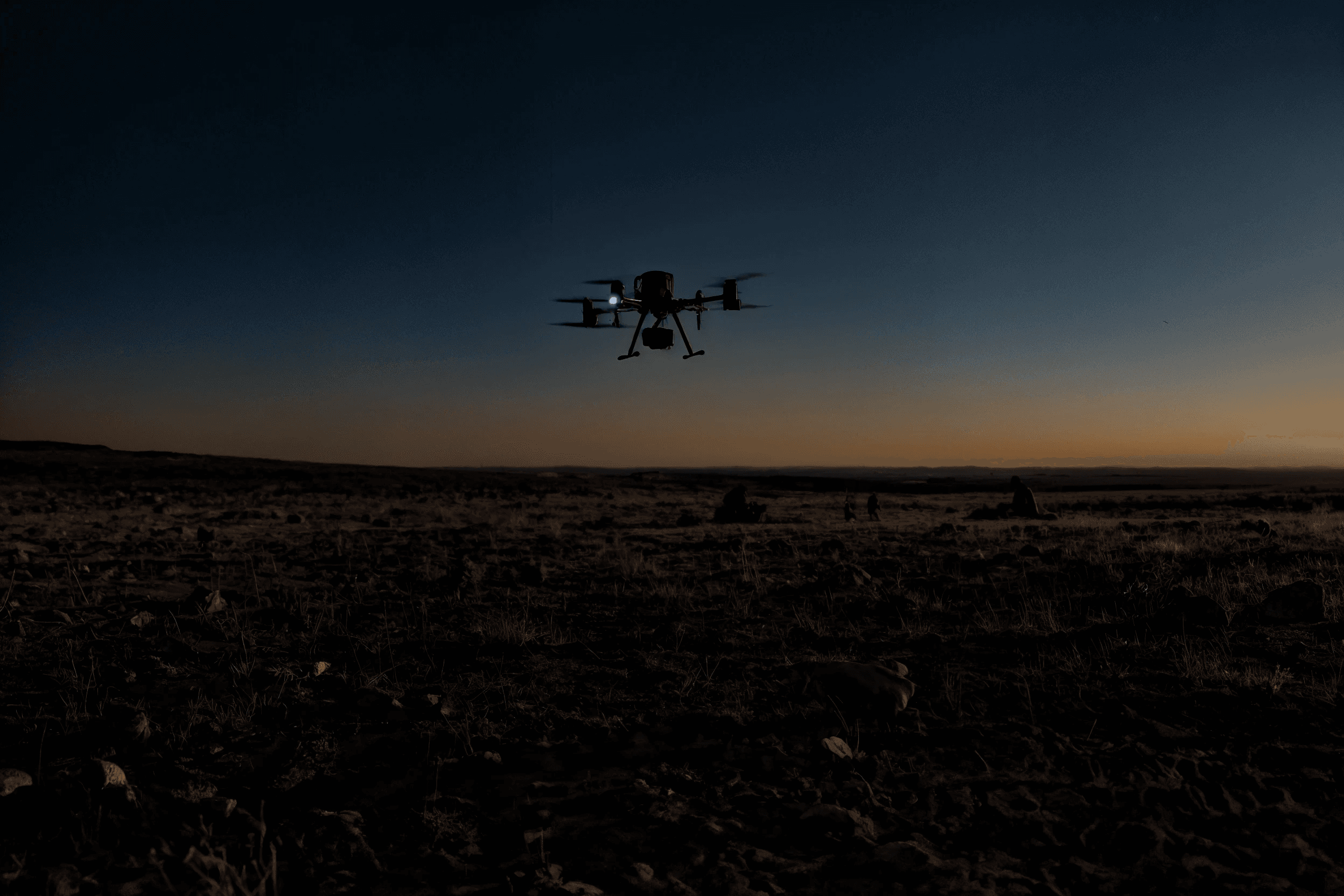
Multi-vehicle coordination
AI swarms
Coordinated multi-vehicle behaviour shipping with operational multirotors. Decentralised mission logic; resilient to lost links and partial failures. Next: heterogeneous swarms across platform classes.
ClassMulti-vehicle coordinationStackDecentralised mission logicNextHeterogeneous swarms
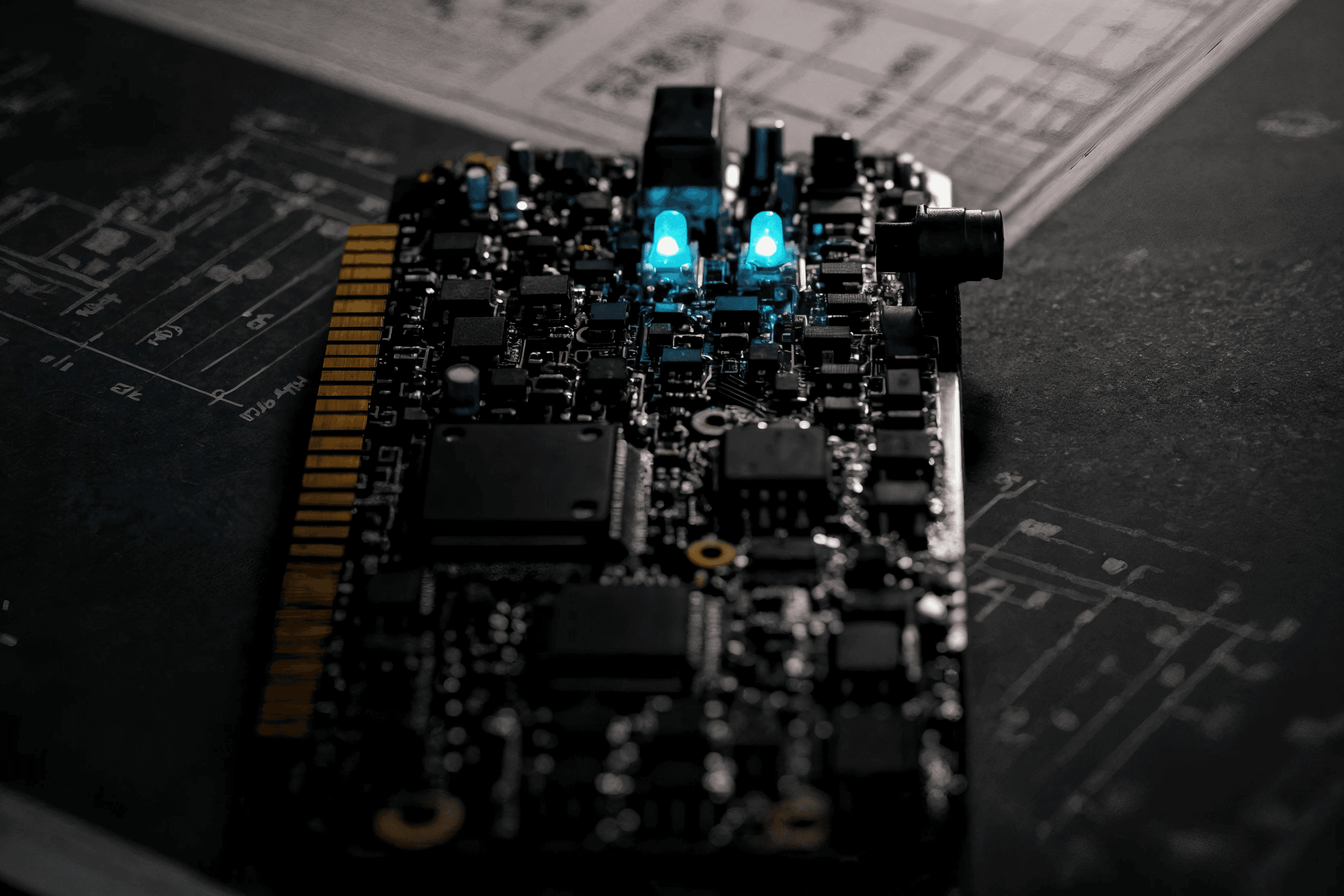
Discipline 02 / EMBEDDED
Embedded Systems
Flight controllers, companion boards, and the high-performance firmware that runs on them. End-to-end ownership of what flies.
- Status: Fielded
Flight controller
Custom autopilot boards
End-to-end ownership of the flight controller: schematic, PCB, and the C/C++ firmware that runs on it. Currently shipping on operational platforms.
ClassFlight controllerStackIn-house schematic, PCB, and firmwareNextCross-platform standardisation - Status: Fielded
Onboard inference and mission compute
Edge compute and companion boards
Companion boards that put real compute next to the flight controller — for onboard inference, AI flight, and mission logic that cannot tolerate a round-trip to the ground.
ClassOnboard inference and mission computeStackNVIDIA Jetson and custom companion hardwareNextHigher-power compute for swarms

Discipline 03 / SOFTWARE
Software
Ground control, mission planning, simulation. The operator surface and the development infrastructure that surrounds every system we ship.
- Status: Fielded
Operator UI and telemetry
Custom Ground Control Stations
The operator surface that ships with our fielded multirotors. Telemetry, mission control, swarming, and the day-to-day workflow that real operators rely on. Built for the way the work actually gets done.
ClassOperator UI and telemetryStackBuilt around the operational workflow we shipNextMulti-platform unified GCS - Status: Fielded
Route and objective planning
Mission Planning
Pre-mission planning that bridges what the operator wants to achieve and what the autonomy stack will actually execute. Integrated end-to-end with our GCS and the onboard autonomy specialisms.
ClassRoute and objective planningStackIntegrated with the GCS and onboard autonomyNextAI-assisted planning - Status: Fielded
Development infrastructure
Simulation and SITL
Software-in-the-loop simulation across the full stack — flight controller, autonomy, swarm logic, GCS — so we can validate behaviours before they ever touch real hardware. In-house standard across the engineering team.
ClassDevelopment infrastructureStackSoftware-in-the-loop across the stackNextHITL extension

Discipline 04 / ELECTRONICS
Electronics
Sensors, comms, power. The integrated electronic architecture of an aircraft, designed at the schematic.
- Status: Fielded
Airborne electronic architecture
Sensor and comms integration
The electronic architecture that ties sensors, comms link, and power into a coherent airborne system. Integrated at the schematic level rather than as an afterthought.
ClassAirborne electronic architectureStackSensor fusion, comms link, power architectureNextHigher-bandwidth comms
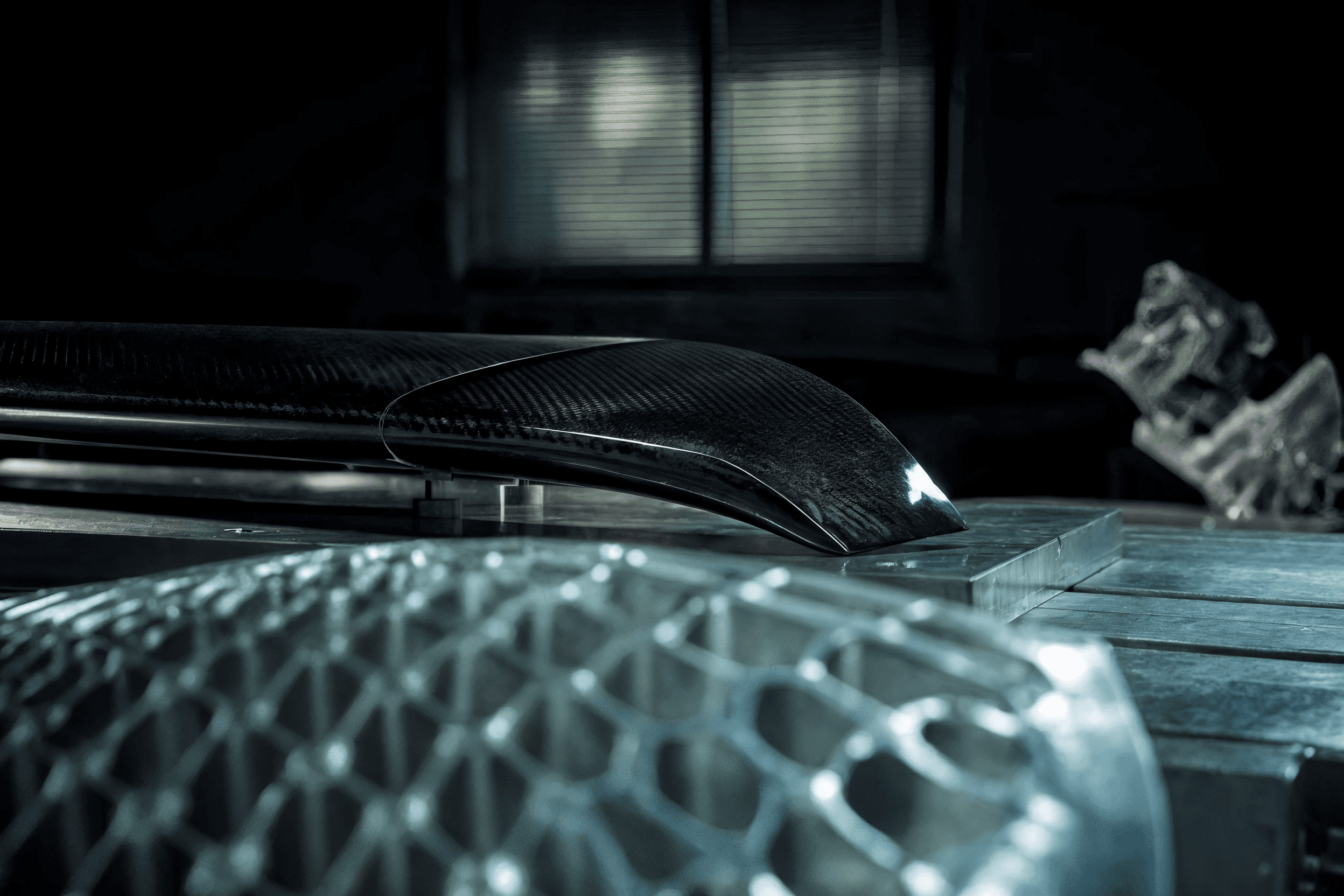
Emerging discipline / Aerospace
Aerospace engineering
The next discipline we are growing into. Owning the airframe and propulsion is the gate to the platforms further up the roadmap.
- Status: In development
Aerospace engineering
Airframe design
The next discipline we are growing into. Owning the airframe means owning aerodynamics, structures, and the trade-offs they impose on the rest of the platform.
ClassAerospace engineeringStackAerodynamics and structuresNextFirst in-house airframe iteration - Status: In development
Propulsion
Engine design
Propulsion is the gate to interceptors and rockets at full capability. Active early-stage research; no fielded hardware.
ClassPropulsionStackPropulsion fundamentalsNextFirst engine iteration
Building a system that needs a capability we haven’t listed yet? Tell us what you need.
Talk to Falanx